Объем произвольного тетраэдра: методы и формулы вычисления
Тетраэдр — это простейший многогранник, имеющий четыре треугольные грани, шесть ребер и четыре вершины.
В отличие от правильного тетраэдра, у произвольной фигуры грани могут быть представлены любыми треугольниками, а ребра иметь разную длину. Определение объема такого тела является классической задачей стереометрии, решение которой зависит от набора известных исходных величин.
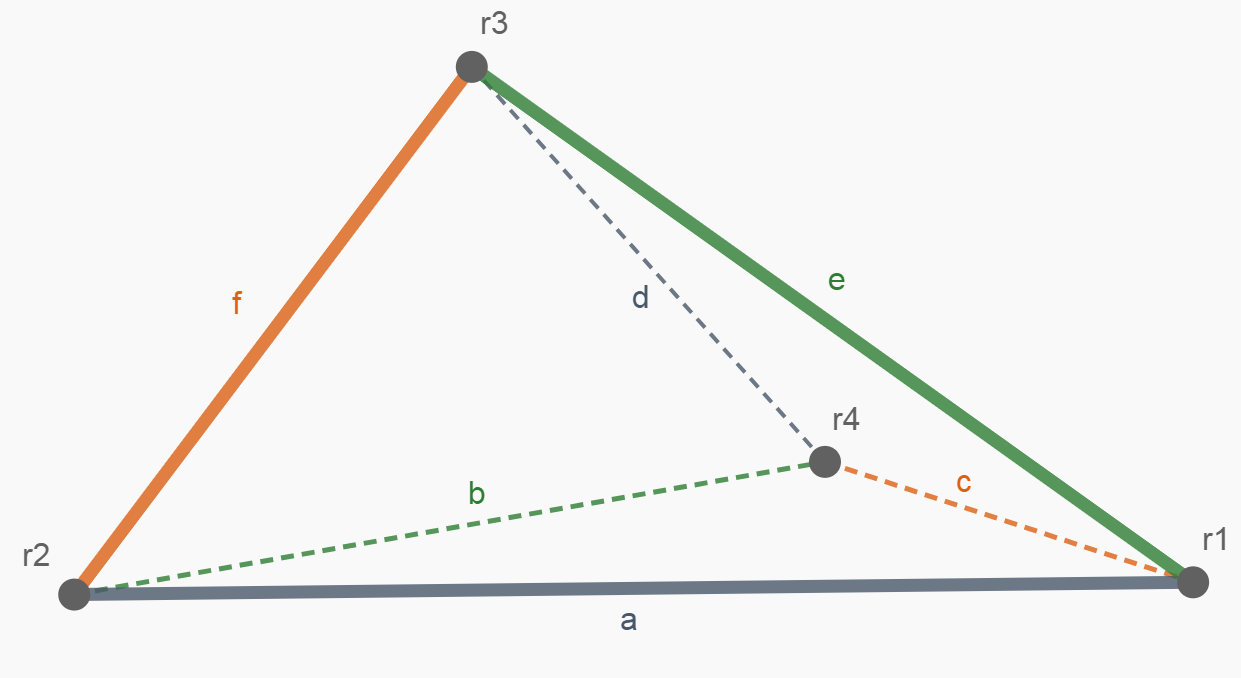 Общий вид произвольного тетраэдра в пространстве.
Общий вид произвольного тетраэдра в пространстве.
Вычисление через площадь грани и высоту
Произвольный тетраэдр можно рассматривать как треугольную пирамиду. Согласно общим свойствам пирамид, его объем равен одной трети произведения площади основания на высоту. В качестве основания может выступать любая из четырех граней — результат вычислений останется неизменным, если высота будет опущена именно на выбранную плоскость.
$V = \dfrac{1}{3}Sh$
- $V$ — объем тетраэдра;
- $S$ — площадь выбранной грани (основания);
- $h$ — высота, опущенная на эту грань из противоположной вершины.
Алгоритм расчета:
- Определить площадь $S$ треугольника, лежащего в основании выбранной грани.
- Провести перпендикуляр из вершины тетраэдра к плоскости выбранного основания и измерить его длину $h$.
- Вычислить произведение площади и высоты, после чего разделить полученное значение на $3$.
Этот метод считается основным в геометрии, так как он опирается на фундаментальное определение объема пирамиды. Он наиболее удобен в случаях, когда тетраэдр задан своими планиметрическими характеристиками и высотой.
Вычисление объема через координаты вершин
В аналитической геометрии объем тетраэдра удобно вычислять, если известны декартовы координаты его четырех вершин в трехмерном пространстве. Этот метод основан на использовании определителя матрицы, составленной из векторов, выходящих из одной вершины. Фактически, объем тетраэдра равен одной шестой части объема параллелепипеда, построенного на этих векторах.
$V = \dfrac{1}{6} \cdot | \Delta |$
- $V$ — объем тетраэдра;
- $\Delta$ — определитель матрицы, элементами которой являются разности координат вершин.
Математический алгоритм:
- Выбрать одну из вершин как начальную точку (например, $r_1$).
- Найти координаты трех векторов, идущих из этой точки к остальным вершинам ($r_2-r_1, r_3-r_1, r_4-r_1$).
- Составить матрицу $3 \times 3$ из координат полученных векторов.
- Вычислить определитель данной матрицы.
- Взять модуль полученного значения (так как объем не может быть отрицательным) и разделить его на $6$.
Преимущество данного способа заключается в том, что он не требует предварительного нахождения длин ребер или площадей граней. Достаточно знать положение фигуры в системе координат, что делает метод незаменимым в компьютерном моделировании и инженерных расчетах.
Вычисление объема через длины всех шести ребер
Когда известны длины всех шести ребер произвольного тетраэдра, его объем можно вычислить без построения высот или поиска углов. Для этого применяется специальная формула, использующая определитель пятого порядка. Этот метод особенно ценен тем, что он опирается исключительно на метрические характеристики фигуры — расстояния между всеми парами её вершин.
$V = \sqrt{\dfrac{1}{288} \cdot \Delta_{CM}}$
- $V$ — объем тетраэдра;
- $d_{ij}$ — расстояние между $i$-й и $j$-й вершинами (длина ребра);
- $\Delta_{CM}$ — определитель Кэли-Менгера, составленный из квадратов длин ребер.
Структура метода:
- Составляется матрица, в которой первая строка и первый столбец заполняются единицами (кроме углового элемента).
- Остальные ячейки заполняются квадратами длин соответствующих ребер $d_{ij}^2$, соединяющих вершины $i$ и $j$.
- На главной диагонали матрицы располагаются нули, так как расстояние от вершины до самой себя равно нулю.
- После вычисления определителя результат умножается на коэффициент $\dfrac{1}{288}$ и извлекается квадратный корень.
$V = \sqrt{\frac{1}{288}
\begin{vmatrix}
0&1&1&1&1\\
1&0&d_{12}^2&d_{13}^2&d_{14}^2\\
1&d_{12}^2&0&d_{23}^2&d_{24}^2\\
1&d_{13}^2&d_{23}^2&0&d_{34}^2\\
1&d_{14}^2&d_{24}^2&d_{34}^2&0\\\end{vmatrix}}$
Данный способ нахождения объема является обобщением формулы Герона для трехмерного пространства. Несмотря на громоздкость ручных вычислений определителя, этот метод дает абсолютно точный результат для тетраэдра любой формы.
Вычисление объема через два противоположных ребра
Данный способ нахождения объема опирается на характеристики двух противоположных (скрещивающихся) ребер тетраэдра. Метод крайне эффективен в задачах, где фигура задана не через площади граней, а через параметры прямых, на которых лежат её ребра. Для расчета необходимо знать длины этих двух ребер, кратчайшее расстояние между ними и угол, под которым они наклонены друг к другу.
$V = \dfrac{1}{6} abh \cdot \sin{\varphi}$
- $V$ — объем тетраэдра;
- $a, b$ — длины двух противоположных ребер;
- $h$ — кратчайшее расстояние между этими ребрами (длина их общего перпендикуляра);
- $\varphi$ — угол между прямыми, содержащими эти ребра.
Суть метода:
- Выбирается пара противоположных ребер, которые не имеют общей вершины.
- Определяется расстояние $h$ — это длина отрезка, который перпендикулярен обоим ребрам одновременно.
- Находится угол $\varphi$ между направлениями этих ребер.
- Объем вычисляется как шестая часть произведения длин ребер, расстояния между ними и синуса угла.
Геометрически этот метод можно обосновать тем, что объем тетраэдра равен одной шестой части объема параллелепипеда, построенного на векторах этих ребер. Это один из самых технически изящных способов расчета, часто применяемый в теоретической механике.
Вычисление объема через три ребра, выходящих из одной вершины
Если известны длины трех ребер тетраэдра, сходящихся в одной точке, и плоские углы между ними, объем можно найти с помощью тригонометрического метода. В основе этого способа лежит вычисление определителя, составленного из косинусов углов при вершине. Фактически, формула описывает объем параллелепипеда, построенного на трех векторах, который затем делится на шесть.
$V = \dfrac{1}{6}abc \sqrt{\Delta_{cos}}$
- $V$ — объем тетраэдра;
- $a, b, c$ — длины ребер, выходящих из общей вершины;
- $\alpha, \beta, \gamma$ — плоские углы между этими ребрами соответственно;
- $\Delta_{cos}$ — определитель, составленный из косинусов данных углов.
Логика вычисления:
- Выбирается одна из вершин тетраэдра и измеряются длины трех исходящих из неё ребер.
- Определяются три угла между этими ребрами: $\alpha$ (между $b$ и $c$), $\beta$ (между $a$ и $c$) и $\gamma$ (между $a$ and $b$).
- Составляется матрица $3 \times 3$, где на главной диагонали стоят единицы, а в остальных ячейках — косинусы соответствующих углов.
- Вычисляется определитель матрицы, из него извлекается корень и умножается на шестую часть произведения длин ребер.
$V = \frac{1}{6}abc \sqrt{\begin{vmatrix}
1&cos(γ)&cos(β)\\
cos(γ)&1&cos(α)\\
cos(β)&cos(α)&1\\\end{vmatrix}}$
Данный подход крайне полезен в случаях, когда тетраэдр задан своими «полярными» характеристиками. Метод позволяет получить точный результат, не прибегая к построению дополнительных высот или поиску площадей противоположных граней.
Особенности работы с калькулятором
Представленные выше математические методы требуют не только знания формул, но и предельной внимательности при работе с размерностями. Калькулятор автоматизирует наиболее трудоемкие этапы вычислений: от раскрытия сложных определителей до возведения чисел в куб. Это позволяет сосредоточиться на анализе геометрических свойств фигуры, минимизируя риск технических ошибок.
Функциональные возможности системы:
- Вы можете вводить линейные размеры ребер и высот в любых удобных единицах — от $мм$ до $км$. Система также поддерживает работу с площадями ($см^2$, $м^2$ и др.) и объемами.
- В случае несовпадения единиц измерения (например, если координаты вершин заданы в метрах, а итоговый объем требуется получить в $см^3$), калькулятор самостоятельно выполнит приведение величин по правилам метрической системы.
- Программный алгоритм корректно обрабатывает иррациональные коэффициенты, синусы углов и определители матриц, сохраняя точность вычислений на каждом этапе.
Таким образом, калькулятор является надежным инструментом для проверки теоретических задач и проведения практических расчетов. Он позволяет быстро сопоставить результаты, полученные разными методами, и убедиться в их корректности.